5-1 Défectologie et vicariance
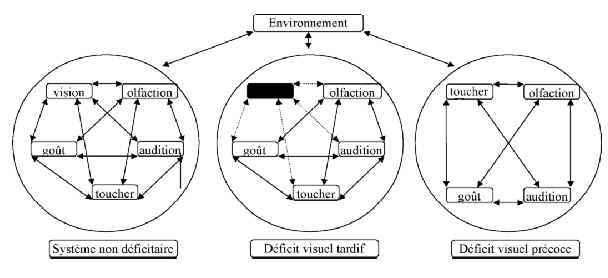
En effet, la hiérarchie d’évocabilité correspond à un classement des processus à la disposition d’un sujet, en fonction de leur probabilité d’apparition pour une tâche donnée. Cette probabilité d’apparition dépend de facteurs divers comme la réussite, la vitesse, le coût,... Ainsi, l’extraction d’une propriété particulière pourrait induire une probabilité d’apparition plus forte de la stratégie d’exploration la plus susceptible d’amener le sujet à la réussite. Toutefois, selon les individus la hiérarchie d’évocabilité peut varier. En effet, chaque individu a une histoire propre qui peut influer sur ses choix. La question qui se pose alors, est de savoir s’il est possible de modifier cette hiérarchie. Reuchlin (1978) pose l’hypothèse au vu de la littérature portant notamment sur les conditionnements opérant et classique et sur l’apprentissage d’évitement, que l’apprentissage permettrait de modifier la hiérarchie d’évocabilité. Qu’en est-il pour un entraînement haptique ? C’est ce que nous nous proposons d’expérimenter dans cette recherche au niveau du choix des procédés d’explorations haptiques, dans une approche de la défectologie * . En effet, dans un système cognitif sans déficit sensoriel, les différentes modalités sensorielles sont en interaction les unes avec les autres (interaction intra-systémique). De plus, ce système est situé dans un environnement avec lequel il entretient des échanges (interaction inter-systémique). Or, si l’une des modalités sensorielles vient à être lésée, toutes les interactions présentes avant la lésion sont maintenues en l’état dans un premier temps, puis vont être modifiées pour permettre l’adaptation du système à son nouvel état. Toutefois, le cerveau va conserver en mémoire une trace des anciennes interactions. C’est ce que nous avons vu précédemment au niveau du phénomène de plasticité cérébrale. Ainsi, les aveugles tardifs auraient la possibilité d’activer leur cortex visuel primaire pour des tâches non visuelles (Hamilton et Pascual-Leone, 1998 ; Büchel, Price, Frackowiak et Friston, 1998) mais dans une moindre mesure que les aveugles de naissance. Ceci nous amène à envisager un second type de système pour des personnes dont une des modalités sensorielles n’a jamais été activée (Portalier, 1996). Dans ce système, aucune interaction intra-systémique ne pourra être mise en place avec la modalité déficitaire. Les données de la neurophysiologie mettent en évidence ce phénomène et montrent que les aveugles précoces ont développé une structuration corticale originale (De Volder, 1997 ; De Volder et al, 1997) avec une implication des aires pariéto-occipitales visuelles dans des tâches auditives ou tactiles. La figure 7 illustre parfaitement les différences entre les trois systèmes : sans déficit, avec déficit précoce, avec déficit tardif).