4.7 - Coordonnées reichenbachiennes, temps verbaux et cadres de référence
Comme nous l’avons indiqué à de nombreuses reprises dans le début de cette thèse, nous inscrivons notre travail dans la perspective localiste appliquée au temps : en d’autres termes, nous considérons qu’il y a une communauté importante entre la représentation linguistique et conceptuelle de l’espace et celle du temps. Nous le montrerons du point de vue linguistique dans le chapitre 5, en examinant la façon dont les mêmes prépositions peuvent être employées pour la représentation de l’espace et pour celle du temps et ce dans toutes les langues que nous examinons dans le présent travail.
Du point de vue conceptuel, nous avons déjà vu que les critères de l’ontologie vendlérienne pouvaient se représenter formellement dans l’ontologie spatiale de Casati et Varzi. Dans une certaine mesure, on peut considérer que la distinction entre systèmes QUOI et OU se retrouve au niveau temporel dans la mesure où les entités temporelles dégagées par Vendler sont identifiées par leurs parties (ou leur atomicité) et par les relations entre ces parties, et où, au-delà de leur identification, les entités temporelles en question, comme les objets-Spelke, doivent être localisées, non plus dans l’espace, mais dans le temps.
La différence principale entre l’espace et le temps tient bien évidemment à une différence de dimensionnalité : là où l’espace est tridimensionnel, le temps est unidimensionnel. Dans cette mesure, la localisation devrait donc être plus simple pour le temps que pour l’espace. Cependant, comme le montrent les coordonnées reichenbachiennes, cette simplicité n’est pas aussi grande qu’on pourrait le penser : en effet, il y a trois coordonnées reichenbachiennes et la localisation temporelle dépend des relations temporelles (de simultanéité ou de succession) entre ces trois coordonnées. Très grossièrement, ces relations sont de trois types : la coïncidence temporelle, la précédence et la succession.
Dans les termes de Casati et Varzi, on peut les réduire, en l’absence d’un ordre temporel, à deux relations : la relation de co-localisation et la relation de localisation (à un moment antérieur ou postérieur). Nous rappelons ici deux formules correspondant à ces deux relations 87 (cf. § 4.2.3) :
(7.4) Lxy PLxy WLxy
(Si x est exactement localisé à y, alors x est partiellement localisé à y et x est complètement localisé à y)
(7.51) RLxy =df Lx(ry)
(x est exactement co-localisé avec y est égal par définition à x est exactement localisé dans la région de y)
Nous allons rapidement prendre l’exemple des temps verbaux en français, nous appuyant sur les travaux de Moeschler (1994) et montrer comment les différentes combinaisons peuvent être assimilées, au moins partiellement, aux cadres de référence spatiaux dégagés plus haut, d’après les indications de Levinson (2003). Voici, selon Moeschler (ibid., 68, figure 7), le système d’analyse reichenbachienne des temps verbaux en français :
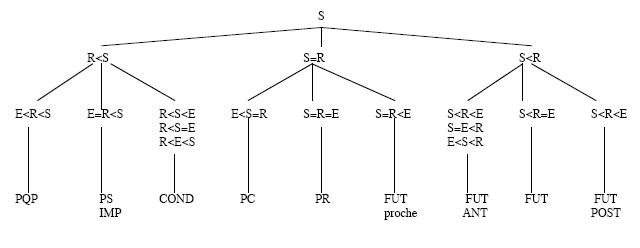
On remarquera que le futur postérieur est une possibilité logique, qui n’est cependant réalisée ni en français ni en anglais. Par ailleurs, le conditionnel et le futur antérieur correspondent à trois structures différentes, ce qui tient au fait que E est jugé non pertinent dans les trois cas. Enfin, le strict système des coordonnées ne permet pas de distinguer le passé simple et l’imparfait, qui se distinguent uniquement sur le plan aspectuel, l’imparfait indiquant que l’événement est ouvert (au sens de Casati et Varzi, cf. (5.2), § 4.2.2)), alors que le passé simple indique qu’il est fermé (de nouveau au sens de Casati et Varzi, cf. (5.3), § 4.2.2). Nous reviendrons sur l’aspectualité au paragraphe suivant.
On se rappellera que E correspond au point de l’événement, i.e. dans les termes utilisés plus haut, l’événement est la cible (l’entité temporelle qui soit être localisée) et E correspond à la région où l’événement se produit. R correspond au point de référence, i.e. dans les termes utilisés plus haut, la référence est le site (l’entité temporelle par rapport à laquelle l’événement — E — doit être localisé). Enfin, S correspond au point de la parole, le moment où l’énoncé est produit, c’est-à-dire à la réduction de la notion de point de vue à une donnée déictique. Si on essaie de rapporter les coordonnées reichenbachiennes aux points dégagés par Levinson, on remarquera que E correspond à F (la figure = cible chez Levinson), R correspond à G (le ground = site chez Levinson 88 ) et que S correspond à V (le point de vue chez Levinson).
Ce que nous nous proposons de faire maintenant est d’appliquer les critères « fixes » 89 de Levinson relativement aux cadres de référence aux différents temps verbaux, qui, de ce point de vue, se ramènent à un ou plusieurs cadres de référence. Pour ce faire, nous allons donc reprendre les trois premiers critères du tableau 2 et les appliquer aux différentes configurations entre coordonnées reichenbachiennes qui définissent les temps verbaux du français 90 . Comme le tableau 4, le tableau 5 se lit à l’inverse du tableau 2 (critères verticaux et temps verbaux horizontaux) :
| Relation | Origine | Ancrage | |
|
Plus-que-parfait
E<R<S |
ternaire | point de vue | R et S |
|
Passé simple/Imparfait
E=R<S |
ternaire | point de vue | R et S |
|
Passé composé
E<S=R |
ternaire | point de vue | R et S |
|
Présent
S=R=E |
ternaire | point de vue | R et S |
|
Futur proche
S=R<E |
ternaire | point de vue | R et S |
|
Futur antérieur
S<R 91 |
ternaire | point de vue | R et S |
|
Futur
S<R=E |
ternaire | point de vue | R et S |
Si l’on compare les tableaux 2 et 5, on voit que le plus-que-parfait, l’imparfait, le passé simple, le passé composé, le présent, le futur proche et le futur sont ternaires, qu’ils ont leur origine dans le point de vue et un de leurs points d’ancrage dans S (le point de la parole). En d’autres termes, tous ces temps, d’après les critères de Levinson, s’inscrivent dans un cadre de référence relatif. Pour autant ce cadre de référence ne saurait à lui tout seul suffire à indiquer une orientation pour une raison simple : le point de la parole n’est rien d’autre que cela, un point, c’est-à-dire une entité unidimensionnelle (ou conçue comme telle) qui ne peut doncavoird’orientation intrinsèque 92 . C’est ici que la notion de point de référence prend toute son importance. C’est elle en effet qui permet d’indiquer dans quelle direction s’oriente le point de vue : soit vers l’avenir si S < R, soit vers le passé si R < S, soit enfin qu’il se concentre sur l’instant présent si S = R. C’est pour cette raison que nous indiquons deux points d’ancrage dans le tableau 5. On remarquera que l’on peut dès lors proposer une série de schémas pour rendre compte des différentes orientations que prend le locuteur suivant le temps qu’il emploie :
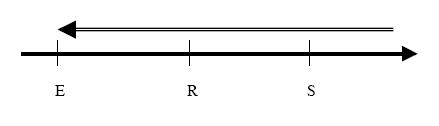
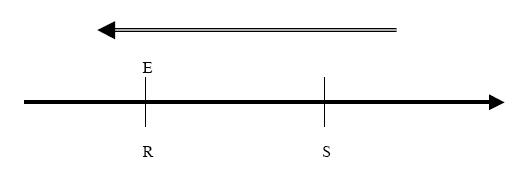
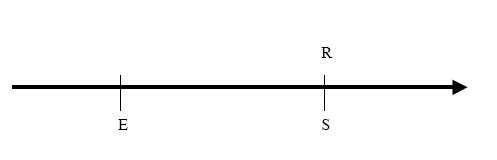
Si l’on compare les différents temps verbaux eu égard aux différentes orientations qu’ils surimposent à la flèche du temps, on s’aperçoit que certains n’imposent aucune orientation supplémentaire 95 — il s’agit du passé composé, du présent et du futur proche —, que certains lui imposent une direction qui coïncide avec la sienne propre — il s’agit du futur et du futur antérieur — et, enfin, que certains lui imposent une direction qui est l’inverse de la sienne propre — il s’agit du passé simple, de l’imparfait et du plus-que-parfait. On pourrait, dans cette optique, considérer que R n’est utile que pour les temps qui imposent une direction opposée à celle de la flèche du temps et qu’il est superfétatoire pour les temps qui soit n’imposent aucune direction, soit imposent une direction identique. Ce serait néanmoins oublier que la nécessité de R ne repose pas sur l’orientation imposée (le résultat), mais sur son utilité dans le calcul de cette orientation.
En bref, les temps verbaux ne se distinguent pas les uns des autres sur la base du cadre de référence dans lequel on les appréhende, puisqu’ils sont tous assujettis au même cadre de référence, à savoir le cadre de référence relatif. En revanche, ils diffèrent quant à la relation temporelle entre S et R (comme on le voit sur le tableau de Moeschler, cf. figure 7 ci-dessus), qui va, selon les cas, orienter le point de référence dans le sens de la flèche du temps, dans le sens inverse à celui de la flèche du temps, ou, enfin, ne pas l’orienter du tout. Ceci délimite trois classes de temps verbaux qui se différencient de façon interne quant à la localisation de E.