3.3. Relations systémiques et transfert intermodal
Portalier (1996) a exposé, dans une approche en défectologie 6, une conception originale des situations de handicap sensoriel, en référence au modèle théorique de l’Analyse des Systèmes de Von Bertalanffy (1973). Dans cette conception, le système sensoriel est composé de sous-systèmes qui interagissent entre eux (interactions intrasystémiques) et qui permettent à l’individu d’interagir avec son environnement. En cas de déficience sensorielle, deux configurations de ce système peuvent se présenter.
Une première correspond à la situation où le sujet aveugle a déjà utilisé l’activité sensorielle déficitaire (dans le cas de la cécité tardive, par exemple). Dans ce contexte, les interactions intrasystémiques ne sont pas supprimées, mais modifiées de manière à revenir à un état d’équilibre homéostatique. La plasticité cérébrale joue un rôle important dans la mise en place de nouvelles procédures de traitement de l’information. La figure 7 ci-dessous illustre cette première situation.
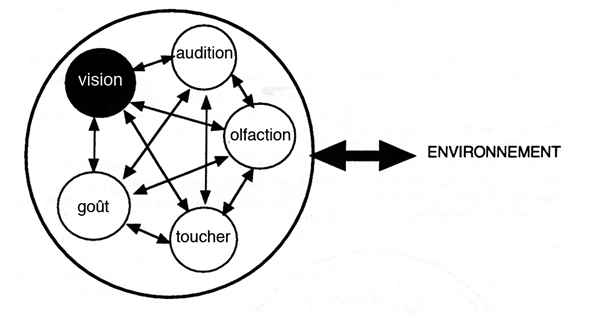
Source : Portalier (1996)
Une seconde configuration du système se présente dans le cas où la personne aveugle n’a jamais utilisé la modalité sensorielle déficitaire (chez l’aveugle de naissance, par exemple). Dans ce cas, le système peut être représenté de la façon suivante (fig. 8).
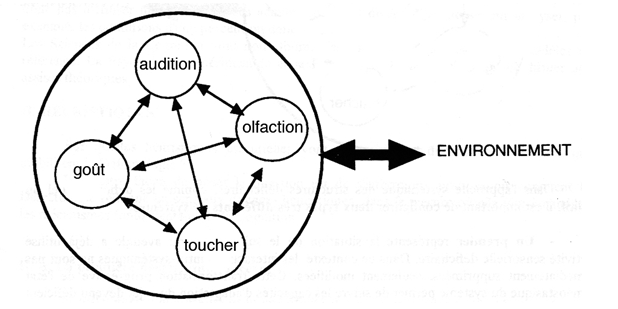
Source : Portalier (op. cit.)
Dans ce second dispositif, l’équilibre est assuré par l’interaction de quatre éléments entre eux. Le mode d’interaction y est donc tout à fait original, aboutissant à un traitement de l’information très différent. Cette conception soulève la question du transfert intermodal des compétences sensorielles.
Connolly et Jones (1970) cités par Hatwell (1994) proposent l’idée d’une « traduction » des données d’une modalité sensorielle à une autre. Leur modèle postule que tout transfert d’une modalité à l’autre nécessite un « recodage » par lequel l’information, arrivée dans un code donné, est traduite dans le code de la modalité de la réponse. Cette traduction est interdépendante de la constitution d’un transfert intermodal s’exerçant :
‘« […] quand une information reçue à travers une modalité est utilisée correctement dans une autre modalité. Tel est le cas quand un objet perçu visuellement est ensuite reconnu par le toucher, ou quand une source sonore est localisée visuellement ». (Hatwell, op. cit., p. 543)’Les informations apportées par chaque modalité sensorielle sollicitée (auditive, visuelle, tactile, etc.) peuvent donc être transférables vers une autre modalité.
Pour Piaget (1936/1997), le transfert intermodal s’acquiert progressivement, au fur et à mesure des expériences. Il n’y aurait aucun transfert intermodal à la naissance, l’espace se décomposant, chez le nourrisson, en différents « espaces hétérogènes », visuel, auditif, tactile, kinesthésique, etc., chacun spécifique d’une activité sensori-motrice. Ces espaces se coordonnent progressivement au niveau sensori-moteur : vers quatre-cinq mois, s’associent notamment la vision et la préhension, avec comme bénéfice l’apprentissage des propriétés des objets et des relations spatiales entre les objets. Les schèmes propres à une modalité deviennent dès lors progressivement assimilables à une autre modalité.
Dans cette perspective, Streri (1991) a introduit la notion d’« espace multimodal intégré » pour illustrerla coordination des perceptions visuelles avec les perceptions tactiles et auditives dès les premiers mois de la vie. Une fois qu’une information est reçue à travers une modalité sensorielle, elle peut être disponible sur d’autres modalités. Streri (op. cit.) a, par exemple, montré que le bébé était capable, dès cinq mois, de transférer la capacité de différencier visuellement deux formes sur une autre modalité, tactile. Nous pouvons prendre l’exemple d’un nourrisson de six mois voulant saisir un mobile sonore. L’œil perçoit la forme de cet objet, la main le poids, et l’oreille l’émission sonore. L’objet mobile est ainsi perçu visuellement, mais aussi reconnu par le toucher et l’audition. La taille du mobile convoité par le nourrisson est évaluée visuellement, auditivement et tactilement. Il en est de même pour sa localisation. Chacune de ces modalités contribue à une connaissance spatiale, en apportant un type d’information spécifique du canal sensoriel considéré. « La mosaïque d’informations recueillies fait l’objet d’une harmonisation pour que l’organisme puisse répondre adéquatement à la situation. » (Streri, 2003, p. 198). Il y a alors mise en relation des différentes perceptions conduisant à la formation d’un objet unique multimodal et multidimensionnel. Cette convergence vers une perception unifiée permet en particulier, chez ce nourrisson de six mois, de réaliser une action dirigée (ici, saisir l’objet désiré).
Chez le jeune enfant aveugle, le transfert intermodal des informations sensorielles va être extrêmement important à favoriser, et ce, le plus tôt possible (Génicot, 1980). Dans cette perspective, Génicot (op. cit.) rappelle l’importance d’encourager chez le jeune enfant aveugle, la saisie, le pointage, la préhension, et le toucher de ce qu’il entend et de ce qui l’environne, c'est-à-dire transférer une sensation auditive en une sensation tactile et gestuelle. D’une manière générale, il est important de favoriser le transfert des informations :
- auditives, provenant de l’espace éloigné,
- tactiles et kinesthésiques, provenant de l’espace de la manipulation,
- proprioceptives, provenant de l’espace corporel.
Les travaux de Veraart et Wanet (1984) ainsi que ceux de Hatwell (1994, 1999) soulignent justement l’importancedes informations vicariantes, auditives, haptiques et proprioceptives qui permettent un enrichissement de l’information, notamment spatiale, au cours du déplacement du sujet aveugle. Ce transfert intermodal favorise chez le jeune enfant aveugle la perception d’un environnement global, stable et permanent, au sens où Piaget (1936/1997) l’entend.
‘« C’est cette permanence de l’environnement qui lui [le tout petit aveugle] permettra de reconnaître la topographie des lieux par rapport à son soi, donc de s’orienter, et plus tard se déplacer. » (Rondal & Comblain, 2001, p.219)’Les compétences de coordination des modalités sensorielles sont particulièrement précoces chez le petit d’homme, mettant à sa disposition une large gamme de modalités sensorielles pour percevoir et appréhender son environnement. Quelle serait alors la conséquence de l’absence d’une modalité perceptive (la vision par exemple) sur la prise de connaissance de l’environnement ?
Le concept de « vicariance » proposé par Reuchlin (1978) amène l’idée qu’un individu, placé dans une situation donnée, aurait à sa disposition un nombre important de possibilités pour s’adapter à la situation dans laquelle il se trouve, lui permettant d’arriver au but qu’il s’était fixé. La personne aveugle, par exemple, va développer des procédures adaptatives originales, qui vont lui permettre de suppléer l’absence de vision. Nous présentons ces capacités compensatoires dans le paragraphe ci-dessous.