1.4.5.2 Un modèle cadre pour l’analyse de la conscience cognitive du risque chez les motocyclistes
En situant notre approche dans la continuité de la théorie de la « Conscience de la Situation » telle qu’elle est appréhendée au LESCOT à travers le modèle COSMODRIVE (Chapitre 2, partie 2.3.3 et 2.3.4), nous définirons ici la « Conscience cognitive du Risque » comme un ensemble de processus perceptifs et cognitifs allant de la détection du danger jusqu’à la sélection d’une réponse possible permettant d’éviter l’accident, en passant par l’élaboration d’une représentation mentale occurrente de la situation de conduite et de sa criticité.
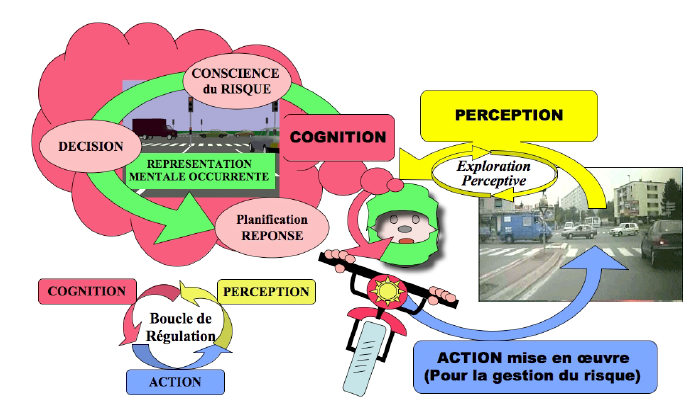
La figure ci-dessous permet représenter synthétiquement cet ensemble de processus contribuant à la « Conscience du Risque » du motocycliste. Elle nous servira de « modèle cadre » pour investiguer la conscience du risque dans ses différentes dimensions.
Le premier processus que nous isolerons est l’étape de perception permettant la détection du danger sur la route. Comme le soulignent Horswill and McKenna (2004, p. 155) « de toutes les habiletés de conduite, la capacité à détecter le danger apparaît comme la compétence le plus essentielle pour éviter l’accident ». Cette phase correspond au moment où le motocycliste prend conscience que la situation de conduite, jusqu’ici parfaitement normale, devient soudainement critique (cf. 3.3.3), c’est-à-dire qu’elle représente une menace pour sa propre sécurité. Comme nous l’avons déjà souligné dans le chapitre précédent, cette étape de détection du danger est capitale pour pouvoir évaluer correctement le risque, décider d’une réponse à y apporter, et éviter ainsi l’accident. Tant que le motocycliste n’a pas détecté pas le danger, on peut considérer qu’il n’a pas conscience du risque (ou que sa conscience du risque est égale à zéro). Cette étape de détection suppose que le conducteur prenne en compte et apprécie correctement un certain nombre de caractéristiques objectives de la situation de conduite et du risque qu’elle renferme (par exemple, détecter la présence d’un trou sur la route ou celle d’un obstacle sur chaussée).
Une fois le danger détecté, la seconde étape cognitive dans la prise de « conscience du risque » porte sur l’évaluation subjective du risque (cf. 3.1.1.1.2). En inscrivant notre réflexion dans le cadre de COSMODRIVE, cette conscience subjective du risque sera définie ici comme un jugement de criticité concernant la situation , c’est-à-dire comme une évaluation de la « menace » telle qu’elle est perçue et ressentie par le motocycliste, à un instant donné. Cette valeur de criticité est directement associée à la « représentation mentale occurrente » qu’élabore le conducteur de la situation de conduite, c’est-à-dire à la « Conscience » qu’il a de la « Situation » à cet instant, mais sous l’angle particulier de la menace qu’elle renferme pour lui. Il ne s’agit donc pas ici d’une simple « perception du danger », mais bien d’une représentation et d’une évaluation mentale du risque. En effet, pour estimer la menace, il faut non seulement détecter les événements critiques se produisant sur la route, mais aussi et surtout se représenter dynamiquement la situation et prendre en compte son évolution dans le temps (par exemple, apprécier la trajectoire d’un véhicule en mouvement en fonction de sa propre trajectoire afin d’identifier un risque de collision et estimer la menace que ce véhicule fait peser sur soi-même).
Pour évaluer la criticité d’une situation de conduite, le motocycliste va baser son jugement sur différentes dimensions sous-jacentes que nous viseront précisément à identifier dans le cadre de cette thèse et dont nous chercherons à mesurer l’importance respective à travers l’une de nos expérimentations (réalisée avec le protocole CRITIC). Mais nous pouvons d’ores et déjà émettre quelques hypothèses de recherche à ce sujet. Tout d’abord, la criticité va dépendre des caractéristiques objectives de la situation (sa complexité, par exemple, ou la brutalité avec laquelle se produit le passage de la situation d’un état « normal » à un état « critique »). La pression temporelle liée à la dynamique de l’événement menaçant, ou bien encore la marge de manœuvre plus ou moins contrainte dont dispose le motocycliste pour gérer le risque seront aussi des éléments importants pour apprécier la criticité. Mais cette estimation dépendra également de la façon dont le conducteur aura anticipé ou non le danger (prévisibilité), soit à partir d’indices précurseurs (cycle d’exploration perceptive), soit en se basant sur des attentes a priori concernant probabilité d’occurrence d’un événement critique particulier (ce qui correspond aux différentes « expectations des risques » dans le modèle de Bötticher et Van Der Molen, 1988 ; cf. 3.3.2.1) Un dernier aspect nous paraît essentiel dans l’estimation que le motocycliste fait de la criticité, c’est la façon dont ce dernier évalue sa propre capacité à gérer adéquatement le risque. Si ce risque lui est très familier, parce qu’il y a souvent été confronté par le passé, par exemple, alors il y a des chances pour qu’il considère la situation comme moins critique, dans la mesure où il saura d’expérience avoir déjà résolu ce type de problème. Dans ce cas, à l’image du modèle SRK de Rasmussen (1986, cf. 2.4.3), il possédera déjà des habiletés (skill level) ou des règles opératoires (rules level) lui permettant de répondre plus facilement au problème. Par ailleurs, les étapes cognitives de « prise de décision » et de « planification de la réponse » (représentée dans notre modèle cadre) seront alors beaucoup plus simples. Par contre, si le problème est totalement nouveau, cela va générer beaucoup plus de stress et de difficultés pour le motocycliste, car il devra alors comprendre le problème, trouver une bonne solution, planifier son action, puis mettre en œuvre une réponse. Il est donc probable que la situation sera alors jugée comme plus critique.
Nous reviendrons sur ce « modèle cadre » dans le chapitre suivant, consacré à la présentation de notre problématique et de nos hypothèses, afin de présenter plus précisément les questions de recherche auxquelles nous chercherons à apporter des réponses dans le cadre de cette thèse. Cependant, une première conclusion apparaît déjà à ce stade : pour chacune de ces étapes cognitives de la « conscience du risque », les compétences du conducteur et son expérience de conduite à moto vont très probablement jouer un rôle déterminant dans la détection du danger, dans l’évaluation de la criticité de la situation et, au final, dans la gestion du risque. C’est sur précisément sur cette question de l’importance de l’expérience de conduite pour l’évitement des accidents que porte la partie suivante de ce chapitre.